Introducción
El entorno de prácticas de la asignatura Robótica es el siguiente:
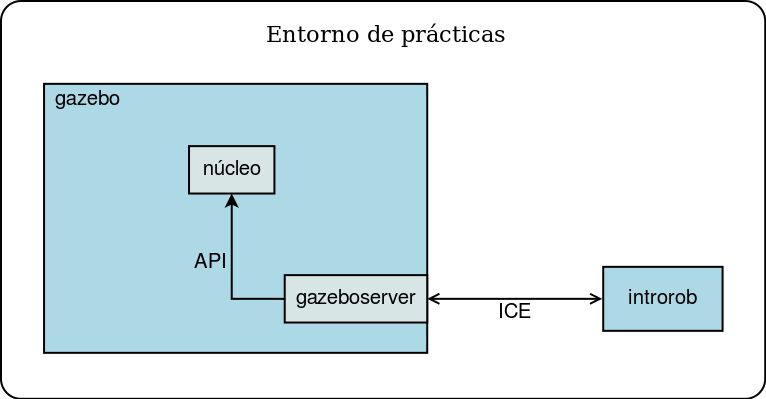
Componentes de JDERobot
- gazebo: Se ocupa de la simulación del mundo.
- introrob: Se ocupa del control remoto del robot simulado.
- El control remoto se lleva a cabo manualmente mediante un joystick visual o automáticamente mediante la llamada recurrente a un subprograma determinado.
- gazeboserver: Se ocupa de conectar a introrob con gazebo.
- Es un servidor ICE que corre dentro del proceso de gazebo y traduce las órdenes que envía introrob en llamadas a la API del simulador.También envía a introrob información de los sensores simulados
Tanto introrob como gazeboserver son parte de Jderobot, un framework para la construcción de aplicaciones robótica desarrollado por el Grupo de Robótica de la URJC.

